
Wie wäre es, wenn mithilfe von Schweißrobotern auch Einzelteile oder Kleinserien produziert werden könnten?
Genau diese Frage hat sich Metal-Interface gestellt. Und diese Themenwahl ist kein Zufall! Tatsächlich gehen die Großserien bereits seit einigen Jahren zurück, während die Kleinserien zunehmen. Allerdings wird die Mehrzahl (90 %) der Schweißroboter mithilfe des Teach-Verfahrens programmiert. Diese Programmiertechnik besitzt zwei große Nachteile: hoher Zeitaufwand beim Programmieren und lange Stillstandszeiten des Roboters. Wodurch sie für Kleinserien ungeeignet ist.... Daher liegt der Schlüssel zur großen Herausforderung der Produktivität in der Programmierung. Weitere Aspekte wie die Sicherheit rund um den Schweißroboter, die technische Beherrschung des Schweißverfahrens usw. sind ebenfalls entscheidend.
Ein Experte für Software für die Offlineprogrammierung von Schweißrobotern, Fabien Arnoux, beim Unternehmen Alma verantwortlich für Robotik, teilt seine Erfahrungen mit uns.
Schweißzelle mit Robotertechnik mit zwei Robotern bei TRUMPF in Hagenau Grenzen des Teach-Verfahrens
Beim Teach-Verfahren wird der Roboter direkt programmiert. Der Schweißer führt den Roboterarm manuell zu einem Punkt des Pfades, dann zu einem zweiten, danach zu einem weiteren und so weiter. An jedem Punkt fordert der Schweißer den Roboter auf, die Koordinaten des Punktes, die Bewegung (linear, kreisförmig, fließend oder nicht usw.), Anfang und Ende des Bogens, die hinzugefügten Parameter wie beispielsweise die Schweißnahtverfolgung usw. zu speichern. Alles wird manuell ausgeführt. Dabei wird für eine Minute Schweißen per Roboter durchschnittlich eine Stunde zum Programmieren benötigt. Große Teile können noch viel mehr Zeit in Anspruch nehmen.
 Fabien Arnoux nennt ein Beispiel: „Ein Kunde stellt Wannenkipper für die Landwirtschaft her. In diesem Fall beträgt die Programmierzeit mit dem Teach-Verfahren für 1 Minute Schweißzyklus mit der Roboterschweißtechnik durchschnittlich 2 bis 3 Stunden. Der Programmierer muss sich dabei um den Wannenkipper herumbewegen, der sehr groß ist: 7 bis 8 m lang, 2,40 m breit und 1,2 m hoch. Er muss sogar eine Leiter benutzen, um an alle Schweißnähte heranzukommen! “
Fabien Arnoux nennt ein Beispiel: „Ein Kunde stellt Wannenkipper für die Landwirtschaft her. In diesem Fall beträgt die Programmierzeit mit dem Teach-Verfahren für 1 Minute Schweißzyklus mit der Roboterschweißtechnik durchschnittlich 2 bis 3 Stunden. Der Programmierer muss sich dabei um den Wannenkipper herumbewegen, der sehr groß ist: 7 bis 8 m lang, 2,40 m breit und 1,2 m hoch. Er muss sogar eine Leiter benutzen, um an alle Schweißnähte heranzukommen! “
Daher beschränken die Hersteller den Einsatz von Schweißrobotern auf Teile, die in sich wiederholenden Großserien produziert werden, wenn sie diese Programmiermethode anwenden. Und Fabien Arnoux fügt hinzu: „Der Schweißer verfeinert sein Programm über mehrere Wochen hinweg immer weiter und die Serie wird dann mehrere Jahre lang produziert.“ Tatsächlich können die durch den Zeitaufwand beim Teach-Verfahren und die Produktionsausfälle aufgrund der Stillstandszeiten des Roboters verursachten Kosten nur durch eine ausreichende Anzahl geschweißter Werkstücke aufgefangen werden. Die Entwicklung in der Industrie geht in Richtung Produktion immer kleinerer Serien. Allerdings wird der Einsatz einer Schweißzelle mit Robotertechnik oft als nicht vereinbar mit der Produktion von Kleinserien angesehen. Die Offlineprogrammierung von Robotern könnte jedoch eine mögliche Antwort darauf sein Der Programmierer/Schweißer entwickelt das Programm am Computer anstatt zwischen Werkzeug, Roboter und Steuerungskasten hin- und herzulaufen. Die Programmierzeit verringert sich und der Roboter wird nicht stillgelegt.
Die Entwicklung in der Industrie geht in Richtung Produktion immer kleinerer Serien. Allerdings wird der Einsatz einer Schweißzelle mit Robotertechnik oft als nicht vereinbar mit der Produktion von Kleinserien angesehen. Die Offlineprogrammierung von Robotern könnte jedoch eine mögliche Antwort darauf sein Der Programmierer/Schweißer entwickelt das Programm am Computer anstatt zwischen Werkzeug, Roboter und Steuerungskasten hin- und herzulaufen. Die Programmierzeit verringert sich und der Roboter wird nicht stillgelegt.
Fabien Arnoux ergänzt: „Wir haben einen Kunden, der Formen für Betonblockpressen herstellt. Dabei geht es im Wesentlichen um Einzelteile oder sehr kleine Serien mit 4 oder 5 Teilen. Die Schweißzeit für eine Form und ihre Bestandteile beträgt ungefähr 7 Stunden. Durch die Offlineprogrammierung konnte er zum Schweißen der Formen in seiner Werkstatt Roboter einsetzen.“Die grafische Programmierung eines Roboters unter Idealbedingungen
Die Programmierung eines Schweißroboters erfordert zweierlei Kompetenzen. Über die Software für die Offlineprogrammierung müssen gleichzeitig die Bewegungen des Roboters (Zugang, Fortbewegung, Zusammenstöße usw.) und die Schweißtechnik (Ausrichtung des Schweißbrenners, Schweißparameter und -position usw.) gesteuert werden können. Der Robotikteil der Zelle ist oft so konzipiert, dass er in unterschiedlichen Umgebungen und für verschiedene Zwecke (Schweißen, Handhabung des Werkstücks, Falzen usw.) eingesetzt werden kann. Daher legen manche Softwareanwendungen ihren Schwerpunkt hauptsächlich auf die Bewegungen des Roboters und die technische Komponente wird manchmal vernachlässigt. Allerdings spart man beim Programmieren des Schweißroboters nur dann Zeit, wenn beide Kompetenzen gleichermaßen vorhanden sind. Dies gilt insbesondere, da die Weiterentwicklung eines Programms direkt am Roboter zum Zeitpunkt des ersten Tests mühsam ist.
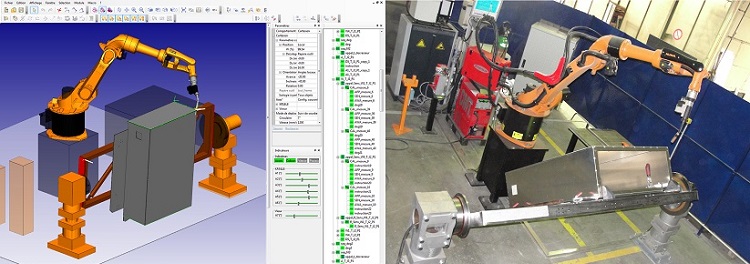
Einsatz von Schweißrobotern bei der Herstellung von mechanischen Unterbaugruppen bei METAL FORMAGE Schließlich ist bei der Offlineprogrammierung eine gute mechanische Kalibrierung der Roboterzelle notwendig, um die erforderliche Genauigkeit bei der Fortbewegung im Koordinatensystem (auf der x-, y- und z-Achse) zu gewährleisten. Der Steuerungskasten im Roboter wandelt die kartesischen Koordinaten in Gelenke um (6 Achsen wie ein menschlicher Arm). Daher führt der Einsatz einer Software für die Offlineprogrammierung dazu, dass der Hersteller des Roboters die Maschine sehr sorgfältig und genau kalibriert.
 Außerdem wird die Sicherheit des Programmierers/Schweißers durch die Offlineprogrammierung erhöht. Durch die lange Programmierzeit beim Teach-Verfahren in unmittelbarer Nähe des Roboters und unter schwierigen Bedingungen besteht ein erhöhtes Risiko für menschliches Versagen.
Außerdem wird die Sicherheit des Programmierers/Schweißers durch die Offlineprogrammierung erhöht. Durch die lange Programmierzeit beim Teach-Verfahren in unmittelbarer Nähe des Roboters und unter schwierigen Bedingungen besteht ein erhöhtes Risiko für menschliches Versagen.
Fabien Arnoux ergänzt: „Ein Anwender bei einem Kunden hat seinen Roboter irrtümlicherweise im schnellen statt im langsamen Modus gestartet. Der Roboter ist mit ihm zusammengestoßen und hat ihn schwer verletzt.“
Mithilfe der Offlineprogrammierung kann ein einzelner Schweißer mehrere Schweißroboter programmieren und so den Fachkräftemangel in einem schwer unter Druck stehenden technischen Beruf ein wenig abmildern.Das Offlineprogramm almaCAM Weld für Schweißroboter
Die erste Offlineprogrammierlösung
Die ersten Entwicklungsbemühungen von Alma für die Offlineprogrammierung von Schweißrobotern begannen 1994 mit dem Auftrag eines Industriellen aus Grenoble. Dieser Baumaschinenhersteller musste seine Schweißroboter wegen der Entwicklung und Installation der neuen Programme mehrere Wochen lang stilllegen. Er wollte die Bauteile daher gerne von einem Computer aus programmieren, um solche Einschränkungen nicht mehr in Kauf nehmen zu müssen. Um dieses Problem zu lösen, entwarfen die Mathematiker von Alma in Zusammenarbeit mit dem Institut de Soudure [Institut für Schweißtechnik] die erste Offlineprogrammierlösung zur Steuerung von Schweißrobotern. Im Rahmen dieser Partnerschaft entwickelte Alma eine umfassende und leistungsfähige technische Lösung , die alle Konzepte des Schweißerberufes in sich vereinte: Ausrichtung des Schweißbrenners, Konzept der Schweißparameter, Kehlnaht in w-Position, Ziehschweißen usw.
Automatisierung und Programm „Nie wieder Nachbesserungen“
Ziel von Alma war es, eine Lösung zu präsentieren, die einerseits möglichst wenige Nachbesserungen am Roboter erforderlich machte und andererseits den Programmiervorgang durch eine ergonomische und an alle Robotermarken anpassbare Software automatisierte. Dies wirkt sich in mehreren Bereichen aus:- Softwarekalibrierung
Bezeichnet die Anpassung der virtuellen Zelle der Software an die reale Zelle. Sie ermöglicht es, die kinematischen Bewegungen der Zelle in der Software möglichst genau wiederzugeben. Dies ist ein äußerst wichtiger Schritt für die erfolgreiche Installation eines Offlineprogramms.
 Fabien Arnoux erläutert: „Eine gute Softwarekalibrierung, eine gute mechanische Kalibrierung der Zelle und der Einsatz von Messungen können die benötigten Nachbesserungen an Programmen beschränken oder überflüssig machen. Wir verfügen im Übrigen über etwa fünfzehn 'Maschinen, an denen keine Nachbesserungen mehr vorgenommen werden müssen, wenn das Programm zum ersten Mal am Roboter getestet wird!“ »
Fabien Arnoux erläutert: „Eine gute Softwarekalibrierung, eine gute mechanische Kalibrierung der Zelle und der Einsatz von Messungen können die benötigten Nachbesserungen an Programmen beschränken oder überflüssig machen. Wir verfügen im Übrigen über etwa fünfzehn 'Maschinen, an denen keine Nachbesserungen mehr vorgenommen werden müssen, wenn das Programm zum ersten Mal am Roboter getestet wird!“ »- Gründliche Methodik
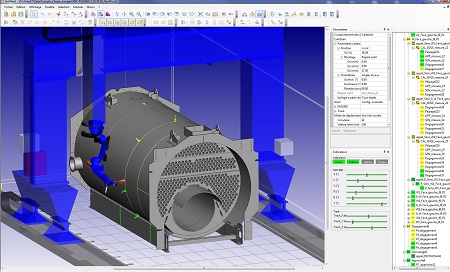
Die Software ermöglicht den 3D-Import des Werkstücks und der zugehörigen Werkzeuge (Schablone) in verschiedenen CAD-Formaten. Dann bestimmt der Programmierer interaktiv durch Bestimmung der Schweißparameter die zu schweißenden Nähte. Auf Grundlage dieser Daten erstellt almaCAM Weld automatisch das Roboterprogramm. Die Software erstellt für jede zu schweißende Naht automatisch die Anfangs- und Endsequenzen. Durch diese Automatisierung verkürzt sich die Programmierzeit erheblich.
Mithilfe der Software für die Offlineprogrammierung von Alma kann das Werkzeug (Schweißschablone) außerdem sogar noch vor der Herstellung geprüft werden.
Automatisierte Programmierung
Über eine Übertragungsfunktion kann eine Programmvorlage A in eine ähnliche Vorlage B mit anderen Abmessungen (Breite, Länge und Höhe) hineinkopiert werden. Das Programm wird automatisch an das neue Werkstück angepasst: die Nähte werden automatisch in der richtigen Länge erstellt. So können aus einer einzigen Programmvorlage sehr schnell mehrere verschiedene Einzelprogramme erstellt werden. Diese Funktion ist besonders im Stahlbau, für Landwirtschafts- oder Baumaschinen usw. sehr nützlich.
Fabien Arnoux bemerkt abschließend: « „Bei der Software für die Offlineprogrammierung handelt es sich um eine gute Lösung, die es ermöglicht, sämtliche Arten von Werkstücken in allen Arten der Produktion mithilfe eines Roboters zu schweißen. Diese Lösung ist sogar unumgänglich, wenn weiterhin in Europa produziert werden soll!“
Urheberrechtlich geschützt - Vervielfältigung ohne schriftliche Genehmigung von Metal-Interface verboten
Contenu